基于 GMTSAR 的 Sentinel-1 时序 InSAR 处理全流程详解
Published:
本文旨在详细阐述使用 GMTSAR 软件对 Sentinel-1 数据进行时序干涉测量(InSAR)处理的标准作业流程。涵盖内容包括数据准备、预处理、图像配准、干涉图生成、相位解缠、SBAS 解算以及最终的时序分析等关键步骤。
说明:文中未显式提供的脚本默认指代 GMTSAR 官方工具包中的标准脚本,用户可直接调用。
处理流程概览
- 数据准备:整理原始影像、轨道文件及 DEM 数据。
- 图像配准:执行粗配准与精密配准。
- 差分干涉:生成干涉图并进行质量初筛。
- 合并子条带:将分条带处理的数据进行拼接。
- 干涉对检查:可视化检查并剔除低质量干涉对。
- 相位解缠:对相位进行解缠处理。
- 大气校正 (GACOS):利用 GACOS 数据去除对流层延迟误差(可选)。
- SBAS 解算:进行短基线集时序反演。
- SBAS 后处理:地理编码、参考点校正及绘图。
- 时序提取:提取特定点位的形变时间序列。
1. 数据准备 (Data Preparation)
处理的第一步是按照 Sentinel-1 的子条带(Subswaths: F1, F2, F3)建立标准化的文件目录结构,如下图所示:
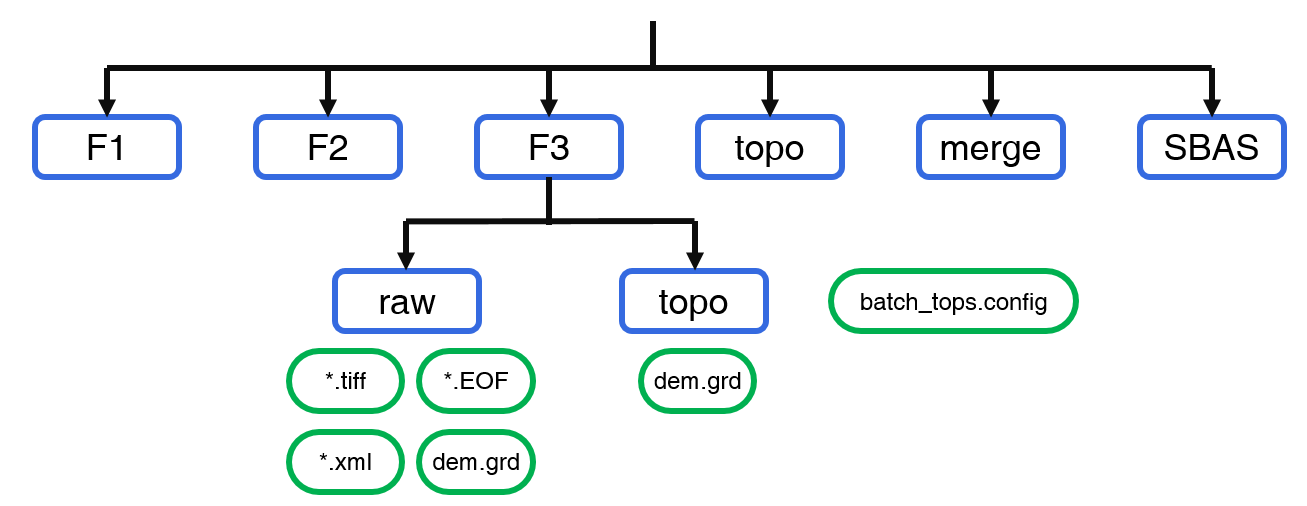
1.1 链接数据文件
将对应的 *.tiff 和 *.xml 文件链接至 raw/ 目录。在 raw 目录下执行以下命令:
link_S1.csh Sentinel-1/data/path swathnumber
1.2 链接轨道文件
将精密轨道 *.EOF 文件链接至 raw/ 目录。在 raw 目录下执行以下命令:
link_S1_orbits.csh Sentinel-1/orbit/path
注意:执行完毕后会生成
data.in文件,内容为数据文件名(无后缀)与轨道文件的对应列表,以冒号分隔。
1.3 准备 DEM
将数字高程模型文件 dem.grd 分别链接至 raw/ 和 topo/ 目录。
2. 图像配准 (Image Registration)
2.1 粗配准 (Coarse Registration)
首先运行批处理脚本进行粗配准:
preproc_batch_tops.csh data.in dem.grd 1
说明:运行完成后会生成
baseline_table.dat文件,包含所有影像的时空基线信息。建议将该文件移动至上级目录,避免在精密配准步骤中被覆盖。
基线表内容示例: S1_20180201_ALL_F1 2018031.1874165505 1491 19.088688436880 56.434825714407 ...
mv baseline_table.dat ../
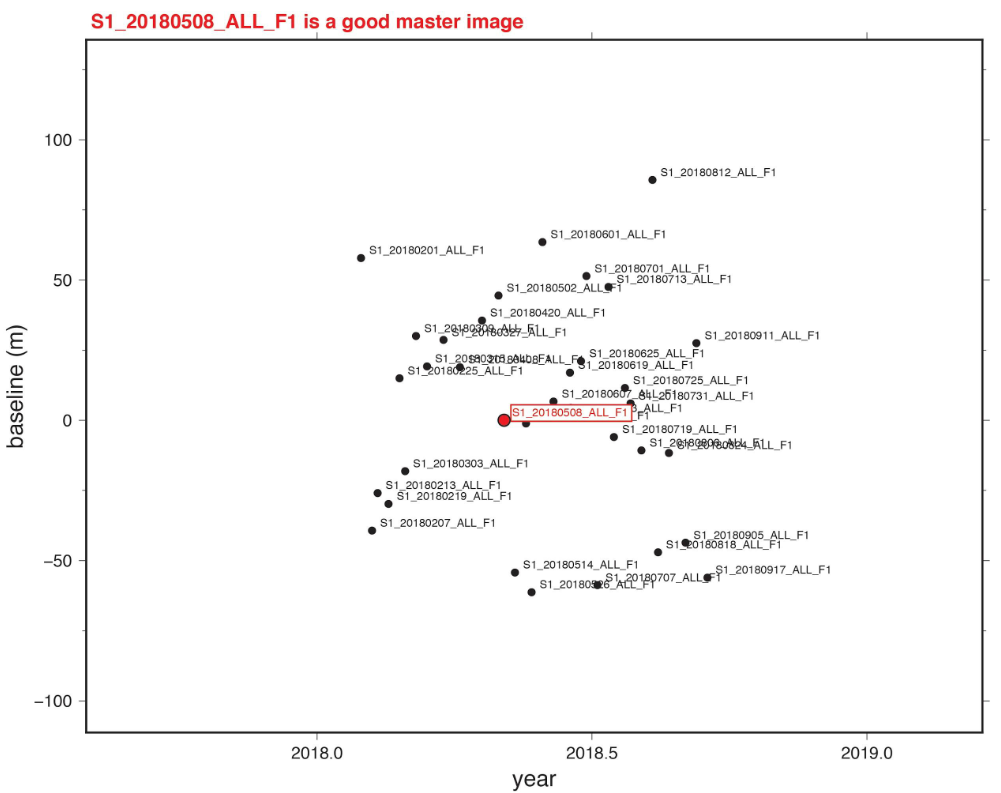
检查生成的 baseline.ps 图表,根据时空分布选择一幅位于中心位置的影像作为超级主影像 (Super Master),所有从属影像将在下一步中与其进行精密配准。
2.2 精密配准 (Fine Registration)
编辑 data.in 文件,将选定的超级主影像所在行移动至文件第一行。
运行以下命令进行精密配准:
preproc_batch_tops.csh data.in dem.grd 2
提示:请在其余子条带(
F2,F3)中重复上述配准操作。
3. 差分干涉 (Differential Interferometry)
3.1 生成干涉对列表
以 F1 目录为例,根据时空基线阈值筛选干涉对:
select_pairs.csh baseline_table.dat 50 100
参数说明:
50:时间基线阈值(天),干涉对时间间隔需小于 50 天。100:垂直基线阈值(米),干涉对垂直基线需小于 100 米。
生成的 intf.in 文件格式如下: S1_20180508_ALL_F1:S1_20180514_ALL_F1 S1_20180508_ALL_F1:S1_20180526_ALL_F1 …
质量检查:检查生成的时空基线图,确保网络连通性,避免出现孤立的影像或干涉对。如有必要,需手动在 intf.in 中添加干涉对。
手动调整后,可使用以下脚本重新绘制基线图以确认: plot_baseline.csh
plot_baseline.csh intf.in baseline_table.dat
3.2 配置参数文件
修改配置文件 batch_tops.config:
proc_stage = 1- 1:从反向地理编码开始,生成
topo_ra.grd。 - 2:跳过地形生成,直接开始干涉图制作、滤波、解缠和地理编码(适用于并行处理)。
- 1:从反向地理编码开始,生成
master_image = S1_20180426_ALL_F1- 重要:必须修改为实际选定的超级主影像名称,且
F1/F2/F3需保持一致。
- 重要:必须修改为实际选定的超级主影像名称,且
range_dec = 8/azimuth_dec = 2- 多视。对于小区域研究,可调整为
4:1以提高分辨率。
- 多视。对于小区域研究,可调整为
dec_factor = 1- 小范围建议设为 1;大范围处理可设为 2 以降低分辨率并提高效率。
3.3 执行差分干涉处理
建议采用分步策略:
- 测试运行:将
proc_stage设为 1,提取intf.in中的第一行进行单对测试,确保参数设置无误。head -1 intf.in > one.in intf_tops.csh one.in batch_tops.config - 并行处理:测试通过后,将
batch_tops.config中的proc_stage修改为 2(跳过topo_ra重复生成),执行并行处理。intf_tops_parallel.csh intf.in batch_tops.config 10生成的干涉图将存放于
intf_all文件夹中。
操作提示:
F2和F3条带的处理仅需复制F1中的intf.in和batch_tops.config并修改对应条带名称即可。
4. 合并子条带 (Merge Subswaths)
4.1 生成合并列表
使用 create_merge_input.csh 脚本生成 merge.in 文件:
create_merge_input.csh intf_list path mode
参数 mode 说明:
0(合并3个子条带),1(合并F1/F2),2(合并F2/F3)。 示例:create_merge_input.csh intflist .. 0 > merge.in
注意:请务必检查 merge.in,将包含超级主影像日期的行置于文件顶部,以确保所有图像基于统一的坐标系和网格处理。
4.2 配置合并环境
将配置文件与 DEM 链接至 merge 目录:
cp ../F2/batch_tops.config .
ln -s ../topo/dem.grd .
4.3 执行合并
运行合并脚本:
merge_batch.csh merge.in batch_tops.config
首个干涉对合并完成后会生成 trans.dat 查找表文件。
并行优化:若数据量较大,可在
trans.dat生成后终止上述命令,改用并行脚本:merge_batch_parallel.sh inputfile config_file
5. 干涉对检查 (Quality Control)
为剔除因数据质量或处理异常导致的错误干涉对,需进行目视检查。
运行绘图脚本: select_phasefilt.csh
./select_phasefilt.csh mode
- mode 1:在
phasefilt_all文件夹中汇总所有干涉图供预览。发现错误图件后,可直接在该文件夹中删除对应文件。 - mode 2:根据
phasefilt_all中剩余的文件,自动将已剔除的干涉对原始文件夹移动至rm目录存档。
6. 相位解缠 (Phase Unwrapping)
相位解缠是时序处理中的计算瓶颈,也是决定结果精度的关键步骤。
6.1 准备解缠列表
在 merge 目录下生成列表:
ls -d 20* > intf.list
6.2 执行解缠
单线程解缠命令:
unwrap_intf.csh intf.list
参数配置:需预先编辑脚本中的参数: snaphu.csh correlation_threshold maximum_discontinuity [<rng0>/<rngf>/<azi0>/<azif>]
correlation_threshold:相干性阈值,通常设为 0.02 - 0.1。maximum_discontinuity:相位跳变阈值,一般设为 0。[...]:解缠范围,留空则默认全图解缠。
6.3 并行解缠 (推荐)
为提高效率,建议使用并行解缠脚本:
./unwrap_parallel.csh intf.list 10
该操作依赖于当前目录下的 unwrap_intf.csh 单元脚本(内容应剔除循环语句,仅保留单次执行逻辑):
cd $1
snaphu[_interp].csh 0.02 0
cd ..
注意:若设置了特定解缠范围,需同步裁剪相干性文件
corr.grd: corr_cut.cshcorr_cut.csh intf.list
7. GACOS 大气校正 (Atmospheric Correction - Optional)
GACOS (Generic Atmospheric Correction Online Service) 校正可有效去除与地形相关的对流层延迟误差。
7.1 使用 GMTSAR 内置脚本 (v2025+)
GMTSAR 2025年7月2日更新版本已集成 GACOS 校正功能。推荐使用并行版本:
make_gacos_correction_parallel.csh intflist GACOS_path ref_range ref_azimuth dem.grd Ncores
| 参数 | 说明 |
|---|---|
intflist | 干涉图列表文件 |
GACOS_path | GACOS 数据路径 (*.ztd, *.rsc) |
ref_range/azimuth | 参考点的雷达坐标 (Range/Azimuth) |
dem.grd | 地形高程文件 |
Ncores | 并行核心数 |
7.2 获取参考点雷达坐标
需将选定的参考点经纬度转换为雷达坐标:
proj_ll2ra_ascii.csh trans.dat points_ll.txt points_ra.txt
points_ll.txt格式:lonlatname。- 注意:至少需要三个非共线且间距适中的点才能完成坐标转换。
7.3 质量复查
校正后需再次检查干涉图质量: gacos_select.csh
gacos_select.csh intf.list
8. SBAS 解算 (SBAS Processing)
8.1 准备 SBAS 输入数据
将 intf.in 和 baseline_table.dat 复制至 SBAS 工作目录,运行准备脚本:
prep_sbas.csh intf.in baseline_table.dat ../merge unwrap.grd corr.grd
提示:若进行了 GACOS 校正,输入文件应替换为
unwrap_gacos_corrected_detrended.grd。该步骤将生成intf.tab和scene.tab。
若前期剔除了部分干涉对,需更新 intf.in: intflist2intfin.sh
intflist2intfin.sh intf.list intf.in
8.2 执行 SBAS 反演
运行核心解算命令:
sbas intf.tab scene.tab N S xdim ydim [-atm ni] [-smooth sf] [-wavelength wl] [-incidence inc] [-range -rng] [-rms] [-dem]
关键参数详解:
| 参数 | 说明 | 推荐值 |
|---|---|---|
intf.tab / scene.tab | 干涉对列表 / 影像列表 | - |
N / S | 干涉对数量 / 影像数量 | - |
xdim / ydim | 干涉图尺寸 | - |
-smooth sf | 平滑因子 | 3 |
-atm ni | 大气校正迭代次数 (CPS方法) | 3 (0为跳过) |
-incidence | 入射角 | 见 xml |
-range | 近距 (Near Range) | 见 PRM 文件 |
-rms | 输出 RMS 误差图 | - |
-dem | 输出 DEM 误差图 | - |
输出结果:
disp_##.grd:累积形变量 (mm)vel.grd:形变速率 (mm/yr)
9. SBAS 后处理 (Post-processing)
9.1 格式转换与地理编码
将 disp_##.grd 重命名为日期格式: post_sbas.csh
post_sbas.csh
计算平均相干性并生成掩膜: mask_meancorr.csh
ls */corr.grd > corr.list
stack_corr.csh corr.list meancorr.grd
mask_meancorr.csh meancorr.grd 0.12
将雷达坐标系结果转为地理坐标系(WGS84): proj_disp_ra2ll.csh
proj_disp_ra2ll.csh disp_ra.list mask_file
9.2 参考点校正
选定稳定区域作为参考点,校正所有形变图: make_reference.csh
make_reference.csh
注意:运行前需编辑脚本,填入准确的参考点经纬度。
9.3 绘图与输出
绘制累积形变时间序列图: plot_disp_ll_zxj.csh
ls 20*referenced.grd > disp_referenced.list
plot_disp_ll_zxj.csh disp_referenced.list -300 100
绘制年形变速率图: plot_grd.csh
plot_grd.csh vel_mask_ll_referenced.grd -60 20
生成 KML 文件以在 Google Earth 中查看:
grd2kml.csh vel_file cpt_flie
10. 时序数据提取 (Time Series Extraction)
10.1 基于坐标列表提取
创建 points.list 文件,格式为 x y name。
方法 A:标准提取(区域平均) 计算指定半径(如 200m)范围内的平均形变值,平抑噪声: extract_ts_std.csh
extract_ts_std.csh
核心命令参考:
gmt grdclip mask.grd -Sa0.2/NaN -Sb0.2/1 -Gmask.grd
方法 B:快速轨迹提取(单点) 不进行空间平均,直接提取像素值,速度较快: extract_ts_track.csh
extract_ts_track.csh
10.2 绘制时序曲线
使用以下脚本快速生成单点时序图: plot_timeseries.csh
plot_timeseries.csh name_ts_disp.txt